
O presente estudo de caso busca apresentar as etapas necessárias para a realização do controle de um conversor CC/CC através do uso de um controlador. Nesse caso, o processo será descrito através de softwares, como Matlab e Typhoon HIL.
O conversor Buck, o qual pode ser visto na figura 1, é caracterizado por ser um abaixador de tensão de modo que a sua tensão de saída é menor que a sua tensão de entrada.

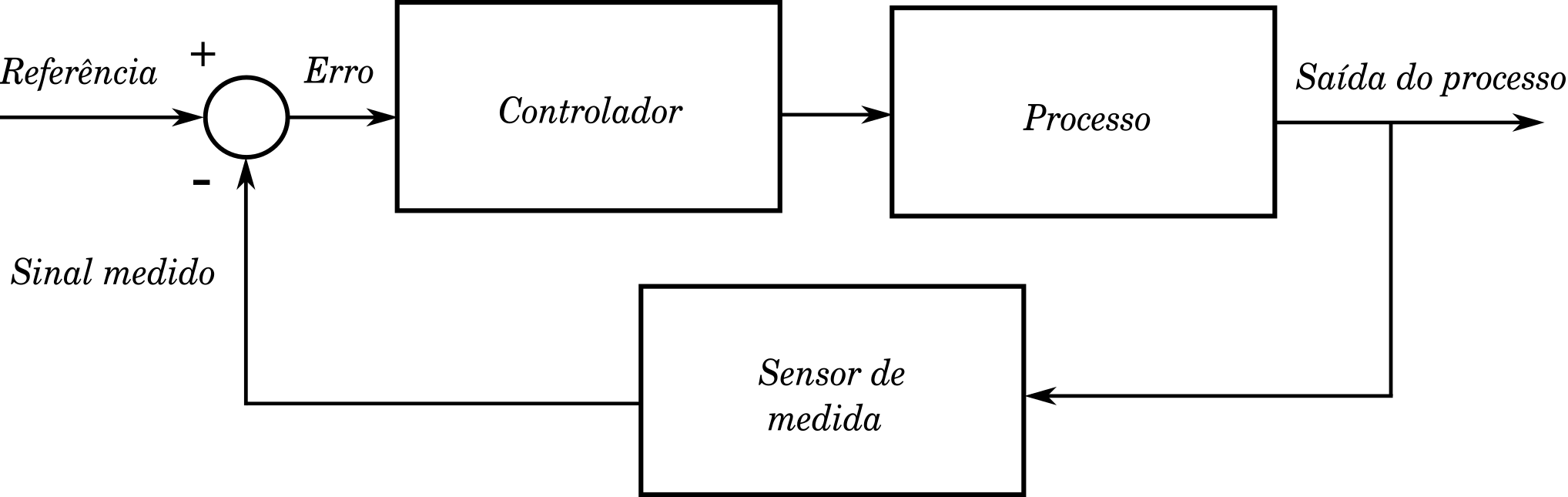
Enquanto isso, os controladores são utilizados em sistemas de malha fechada para controlar o valor de saída desse sistema. Com os devidos ajustes, é possível manter tal valor de forma estável e com erro mínimo. Para isso, deve ser feita a correta escolha para os parâmetros que compõem o referido controlador. Dessa maneira, o sistema deve apresentar um valor de referência de modo em que o controlador possa fazer o valor de saída se aproximar ao máximo desse valor. Ou seja, de forma a minimizar a variável de erro a qual consiste na diferença entre o valor de referência e o valor de saída atual, a representação de tal sistema de malha fechada com um controlador é mostrada na figura 2.
Neste desenvolvimento, será utilizado o controlador P no qual a letra P indica a ação proporcional promovida. Tal efeito é responsável pela promoção de uma resposta com maior velocidade sob variação do valor de referência. Esse controlador pode ser usado para o controle da tensão de saída do conversor ou até mesmo para o controle da corrente no indutor. Neste caso, será efetuado o controle para a tensão de saída do conversor Buck. Desse modo, o processo para se obter a simulação desejada é dado a partir das etapas apresentadas a seguir:
Modelagem do Conversor Buck
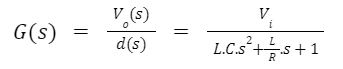
A primeira etapa consiste na obtenção da função de transferência do Conversor Buck através de sua respectiva modelagem. No caso do conversor Buck, tal função é conhecida, conforme mostrada na expressão abaixo, e pode ser usada diretamente. Porém, há sistemas em que a função de transferência do sistema é desconhecida e precisa ser obtida (fica como desafio ao leitor confirmar que a função de transferência desse conversor é válida a partir de sua modelagem). É importante ressaltar que a função de transferência se trata da relação entre a entrada e saída de um sistema, as quais são, no caso em questão, respectivamente tensão de saída do conversor Buck e duty cycle.
Obtenção dos Parâmetros do Controlador P
Após encontrar a função de transferência do sistema, faz-se uso do software de simulação MATLAB para se obter o parâmetro necessário para o controlador P (KP). O código para se definir a função de transferência do controlador P está dado a seguir:

Dessa forma, deve-se utilizar o recurso PID Tuner, presente nesse software. Tal ferramenta recebe como parâmetro a planta a ser controlada através de sua respectiva função de transferência, a qual foi obtida no item anterior.
Com isso, é possível definir o tipo de controlador a ser projetado, as características do controle, entre outros. Após definir tais configurações, o parâmetro KP é obtido. As definições referentes ao controlador são mostradas a seguir:

Desse modo, os resultados obtidos são os seguintes:


Ressalta-se que a oscilação em torno da amplitude que vale 1 na figura 6 é esperada e se deve ao fato do controlador escolhido ser do tipo P.
Montagem do Sistema de Malha Fechada
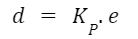
Com o parâmetro do controlador P, o código que realiza o controle já pode ser desenvolvido. Para isso, é importante ressaltar que a saída do controlador P (duty cycle) é dado pelo produto entre o parâmetro da ação proporcional e o erro, o qual consiste na diferença entre o valor esperado na saída do sistema e o valor atual:
Dessa maneira, o código, a ser aplicado no bloco de código em C do Typhoon HIL, é mostrado abaixo:

Com isso, quando o código estiver configurado no bloco C function e o esquemático do circuito estiver montado conforme a imagem a seguir, a simulação pode ser executada.
Simulação do Sistema
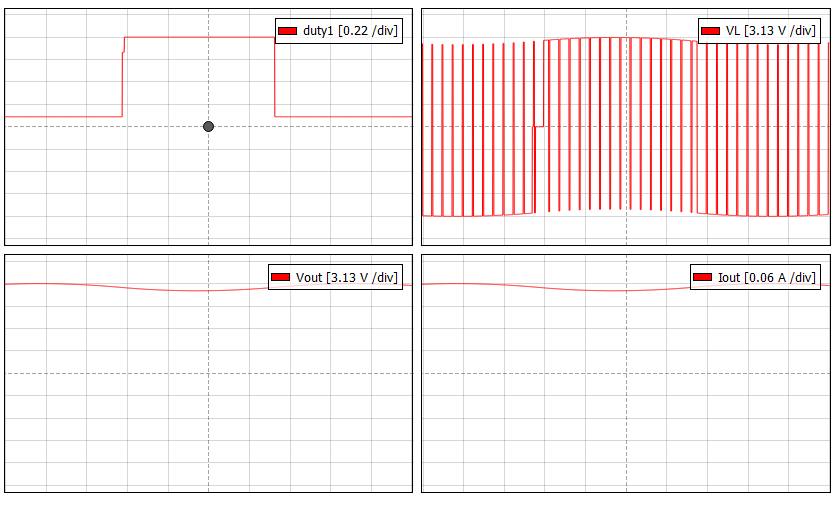
Na aba de simulação, denominada HIL Scada, é possível verificar os valores dos parâmetros presentes no sistema em tempo real. Se o arquivo de simulação disponibilizado for utilizado, nota-se que o circuito está reduzindo a tensão de entrada (24V) de modo que o valor de saída se aproxima do valor esperado (12V). É válido perceber ainda que, como o conversor buck é abaixador, a tensão de referência (valor esperado) não pode ser maior que o valor de entrada. Dessa forma, a sessão HIL Scada é apresentada abaixo, assim como o osciloscópio disponível pelo software para visualização dos sinais presentes no sistema:



Sobre o Autor